
Swish! by alanfreed
Swish! by alanfreed | Kinematics in 2-dimensions. By the end of this you will |
Two (or Three) Dimensional Motion
For example: Projectiles, Planets, Pendulum, ....
Need to have some new mathematical techniques to do this: however you may need to revise your basic trigonometry
Basic Definitions of trig relationships
A useful mnemomic SohCahToa
θ = a
R
Sin = opposite = d
hypotenuse R
Cos = adjacent = R-δ
hypotenuse R
Tan = opposite = d
adjacent R-δ
|
|
Basic Trig.
Useful relationships
These are not so useful
Special Values
|
|
We often have a convenient simplification when the angles are small
θ = a/R ~ sin(θ) = d/R ~ tan(θ) = d (R-δ) cos(θ) ~ 1
Note that this only works if we measure angles in radians: 2π radians = 3600 |
 |
Need new mathematics to describe three dimensional objects:
Scalars: quantities with only magnitude
Vectors have direction as well
| Scalars | Vectors |
| Temperature | Force |
| Speed | Velocity |
| Density | Acceleration |
| Time? | Time? |
Need a new symbol: can use
We will use both ${\vec a}$ and a,
Need to be able to describe vectors in terms of scalar quantities: can do this in terms of components: the projection of the vector along each axis
| These are the components of the vector ${\vec a}$
Note that the components of a vector are scalars |

|
Also can do this in terms of length of the vector and angle(s).
These two descriptions are related
ax = a cos(θ) ay= a sin(θ) |
 |
| Adding vectors: put them nose to tail. Easy diagramatically | 
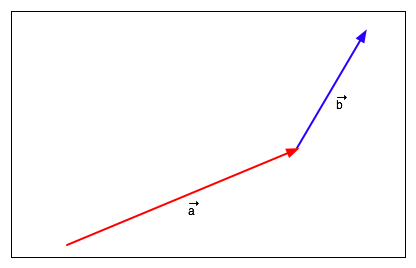

|
If we want to add them algebraically, we just add the components:
|



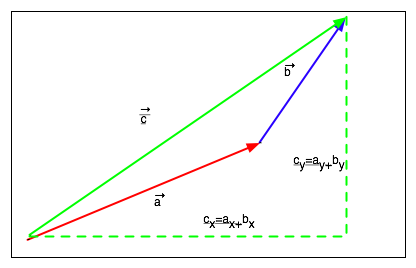
|
${\vec a}$ - ${\vec a}$ = ${\vec a}$ + ( -${\vec a}$) = 0
Note that this means that the negative of a vector just has all its components reversed
 Write this as
Write this as
| e.g. a boat sails 10 km North -East and 5 km South: how must it sail to get to its start? | 
|
| N.E means "equal components along the x and y directions" so first step is | 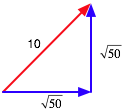 |
e.g. Motion by a car.
A car travels 5 km N, 10 km E, and then 15 km S. The components of vector ${\vec a}$ that describes this are
ax = -10 ay = 20
ax = 10 ay = -10
ax = 10 ay = 10
ax = -10 ay = -10
(can usually be treated as 2-D)
| Treat position, r, velocity v and acceleration as 2-D vectors. In general,motion in one direction can be treated independently of motion in a second. |
| We can also see this quantitatively |
| In general there are three independent vector quantities:
The position r, the velocity v and the acceleration a. However we have to treat the components separately. |
 |
| \color{red}{\begin{array}{l} v_x = v_{0x} + a_x t \\ x = v_{0x} t + \frac{1}{2}a_x t^2 \\ a_x = 0{\rm{ (usually)}} \\ \end{array}} | \color{red}{\begin{array}{l} v_y = v_{0y} + a_y t \\ y = v_{0y} t + \frac{1}{2}a_y t^2 \\ a_y = - g{\rm{ (usually)}} \\ {\rm{ = - 9}}{\rm{.8 ms}}^{{\rm{ - 2}}} \\ \end{array}} |
|
in a river which flows at .7 m/s.
 |
A woman swims 100 m upstream at 2 m/s in a river with a current of .7 m/s, and then 100 m downstream to return to her starting point. Compared to swimming 200 m in still water, does her journey
| As a somewhat more sophisticated example: a woman who can swim at 2 m/s is swimming in a river which flows at .7 m/s. At what angle should she swim to reach a point on the opposite bank immediately opposite the point from which she starts? |
|